
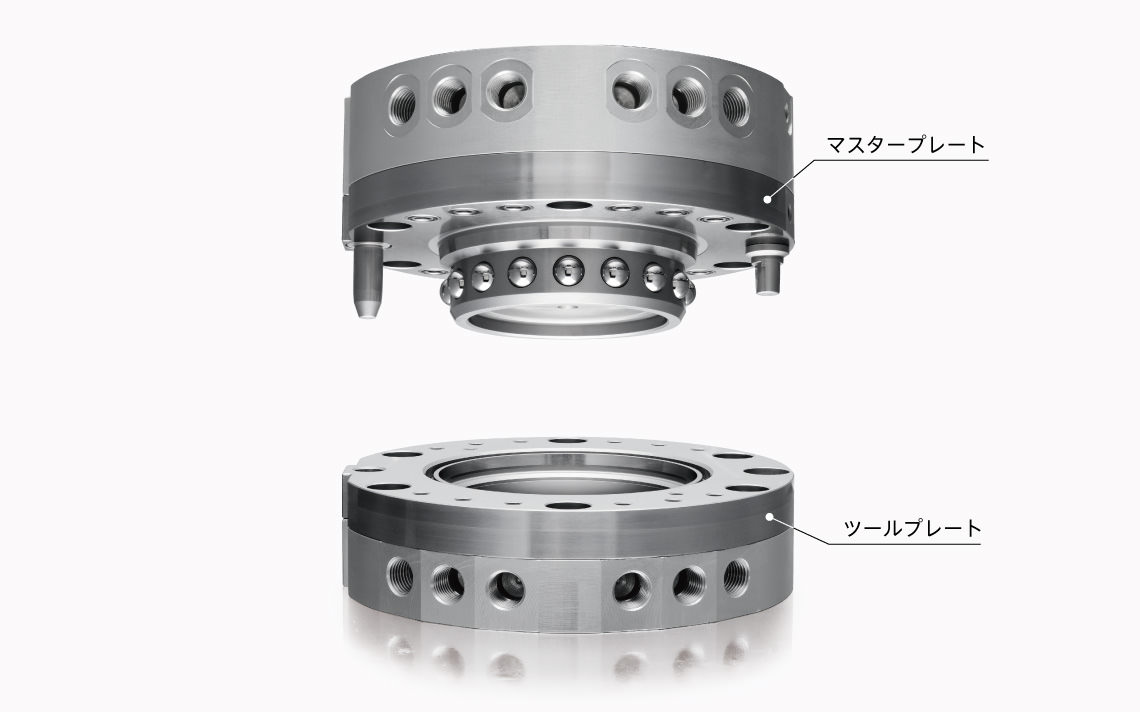
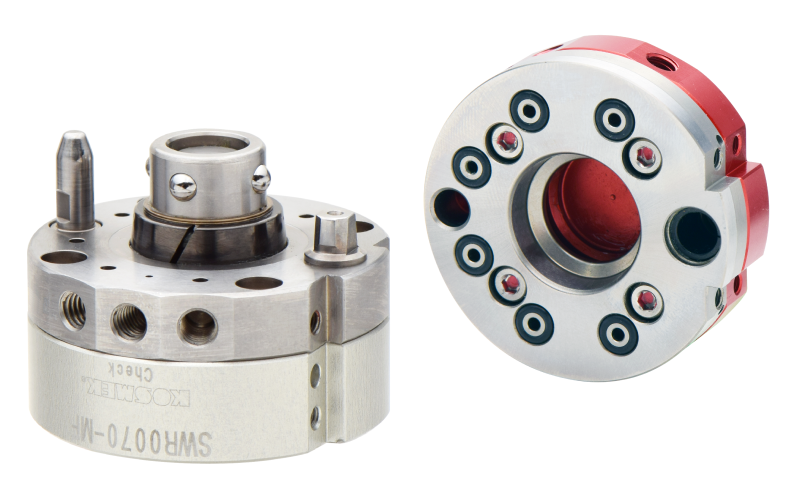
ロボットツールチェンジャー model RHA/RHB
ニ面拘束とピンの回転拘束で確実で高精度なツール着脱を行えるロボットハンドツールチェンジャーです。
- 仕様
- 適合モジュール (0件)
- FAQ
バージョン情報
バージョンを選択してください。
-
- CAD:
- STEP IGES Parasolid
-
- CAD:
- STEP IGES Parasolid
-
- CAD:
- STEP IGES Parasolid
- 出展者
- パスカル株式会社
- リードタイム
- 別途お問い合わせください
- 定価
- ―
| 販売元 | 会社名 |
|---|---|
| パスカル株式会社 |
関連する製品














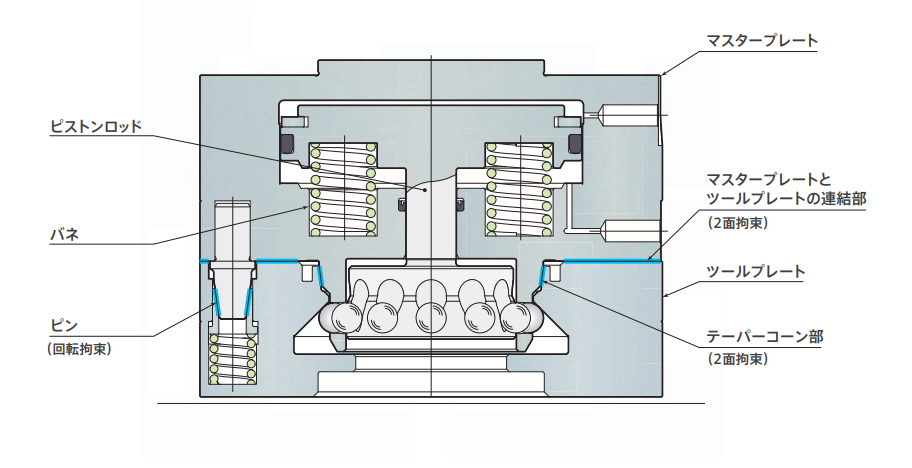
確実・安全な密着保持
テーパコーン部と連結部の2面拘束、ピンの回転拘束で ツールプレートは確実に密着保持されます。
また安全機構としてエアが停止しても、バネ力でツールプレートは保持されます。
お問い合わせ
製品に関するお問い合わせは[[こちら:https://www.pascaleng.co.jp/jp/inquiry/inquiry-work_clamp/]]から
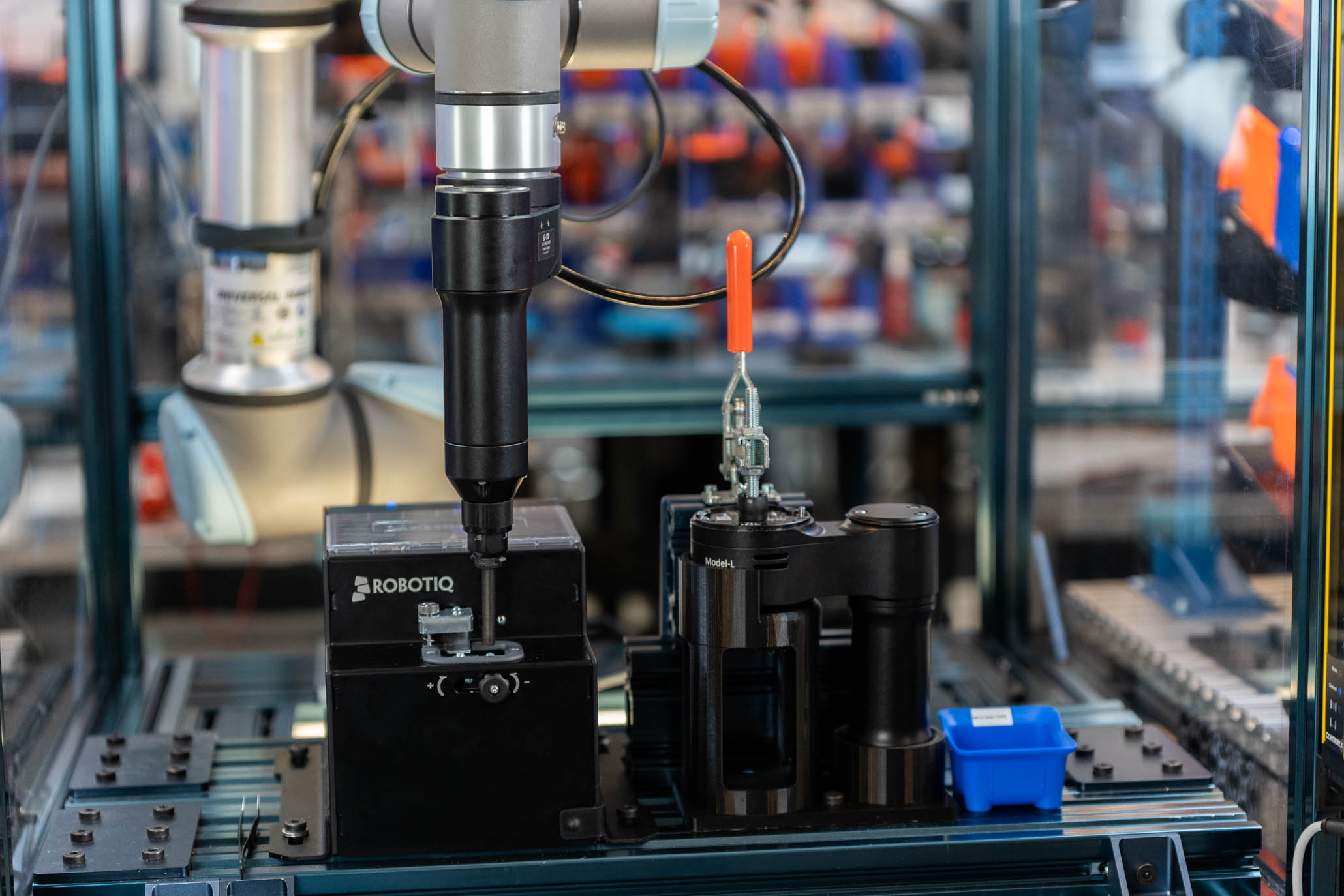
ロボットツールチェンジャ 実施例
仕様
| 可搬質量 | 5kg/ 10kg/ 20kg/ 40kg/ 80kg/ 160kg/ 230kg | エアコネクタ | オプション |
|---|---|---|---|
| 着脱確認センサ | オプション | 電源コネクタ | オプション |